
백준 No.1944 [복제 로봇]
문제
1944번: 복제 로봇
첫째 줄에 미로의 크기 N(4 ≤ N ≤ 50)과 열쇠의 개수 M(1 ≤ M ≤ 250) 이 공백을 사이에 두고 주어진다. 그리고 둘째 줄부터 N+1째 줄까지 미로의 정보가 주어진다. 미로는 1과 0, 그리고 S와 K로 주어
www.acmicpc.net
설명
<알고리즘 분류>
* MST
* BFS
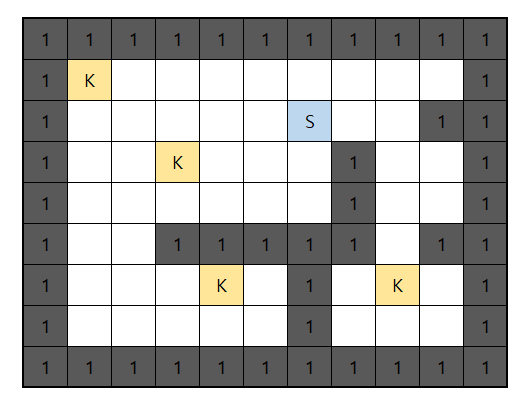
위와 같은 테스트 케이스가 있다고 하자!

먼저, bfs 를 통해 위와 같이 하나의 시작점과 각 Key 들이 이루는 그래프를 구했다.
그래프의 간선들은, 연결된 두 노드의 최소 거리이다.
Key는 최대 250개, 지도 크기는 최대 50 * 50 == 2,500 이니까, Key 하나하나 2,500 크기의 맵을 BFS 해도
최대 250 * 2,500 == 625,000 번 탐색되므로,TLE나 메모리 초과는 없다!
이제, 위 그래프를 토대로 MST 를 진행한다. 이 때 조건이 있다.
조건 #1

시작점에서는 한 개의 로봇만이 출발한다. 즉, 시작 노드와 연결된 간선은 한 개 밖에 없다.
조건 #2
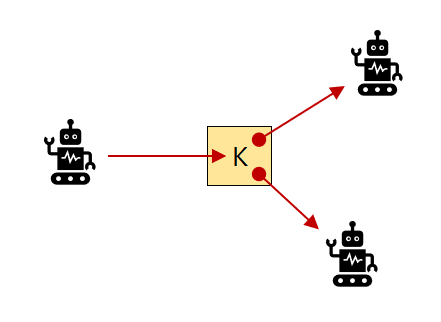
각 Key 가 있는 노드에는 로봇 한 개가 방문하면, 로봇이 복제되어 최대 두 개의 로봇이 다른 Key 를 찾아 떠날 수 있다.
즉, 각 Key 가 있는 노드와 연결되는 간선은 최대 3개 이다.
위 두 조건으로 MST 를 구현하면서 그 MST 의 간선들의 가중치의 합을 구하면 정답이 된다. 그런데 만약, 한 개의 Key 라도 벽에 막혀서 집을 수 없다면 가중치의 합이 inf 보다 큰 수를 나타내도록 구현하였다. 가중치의 합이 inf 미만이라면, 가중치의 합을 출력하고 그렇지 않다면 -1 을 출력하게끔 하였다.
<정리>
1. 각 key 들 끼리의 거리를 구한다.
2. 위 거리들을 구하면서, key 들로 이루어진 그래프가 형성되었다.
3. 이 그래프에서 MST 를 구한다.
- 단, 조건은 시작 Node 에 연결된 간선은 하나, Key 가 있는 Node 들에 연결된 간선은 최대 3개 이다.
Code
#include <iostream>
#include <vector>
#include <queue>
#define inf 99'999
#define N 51 // arr's max size
#define M 251 // key's max count
using namespace std;
struct pos {
int r, c;
int val;
};
struct pos2 {
char val;
int idx;
};
struct comp {
bool operator()(pos& a, pos& b) {
return a.val > b.val;
}
};
pos2 arr[N][N]; // 지도
int robot[N][N]; // robot[r][c] == (r, c) 위치에서 연결된 간선 개수
int key_find = 0; // 찾은 key 개수
int n, k;
vector<pos> keys; // key 들의 위치를 담은 vector array
int key_dist[M][M]; // key_dist[a][b] == keys array 에서 a, b 번째 key 간 거리
pos start; // 시작 위치
int dr[4] = { 0, 0, 1, -1 };
int dc[4] = { 1, -1, 0, 0 };
inline bool isSafe(const int& r, const int& c) {
return 1 <= r && r <= n && 1 <= c && c <= n;
}
void bfs(const int& sr, const int& sc) {
bool visit[N][N] = { false, };
queue<pos> q;
q.push(pos{ sr, sc, 0 });
visit[sr][sc] = 0;
while (!q.empty()) {
pos cur = q.front(); q.pop();
if (arr[cur.r][cur.c].idx != -1)
key_dist[arr[cur.r][cur.c].idx][arr[sr][sc].idx]
= key_dist[arr[sr][sc].idx][arr[cur.r][cur.c].idx]
= min(key_dist[arr[cur.r][cur.c].idx][arr[sr][sc].idx], cur.val);
for (int d = 0; d < 4; d++) {
int nr = cur.r + dr[d];
int nc = cur.c + dc[d];
if (isSafe(nr, nc) && !visit[nr][nc] && arr[nr][nc].val != '1') {
q.push({ nr, nc, cur.val + 1 });
visit[nr][nc] = true;
}
}
}
}
void setDist() { // 50 * 50 map 에서 250 번 bfs ? 가능할듯
for (int i = 0; i < keys.size(); i++)
for (int j = 0; j < keys.size(); j++)
if (i != j) key_dist[i][j] = inf;
for (int i = 0; i < keys.size(); i++)
bfs(keys[i].r, keys[i].c);
}
int mst() {
bool visit[M] = { false, };
priority_queue<pos, vector<pos>, comp> pq;
int ret = 0;
int start_idx = keys.size() - 1; // index of start point
for (int i = 0; i < keys.size() - 1; i++) // keys 의 마지막이 sp 이므로 빼고 go
pq.push({ keys[i].r, keys[i].c, key_dist[i][k] });
visit[k] = true;
while (!pq.empty()) {
pos cur = pq.top(); pq.pop();
if (visit[arr[cur.r][cur.c].idx]) continue;
robot[cur.r][cur.c]++; // 시작점이 되는 key를 pick!
visit[arr[cur.r][cur.c].idx] = true;
key_find++;
ret += cur.val;
if (key_find == k) return (ret < inf? ret : -1);
if (robot[cur.r][cur.c] == 3) continue; // 더이상 뻗을 수 없으므로.
robot[cur.r][cur.c]++; // cur node 에서 뻗어 나가므로 또 추가!
for (int i = 0; i < keys.size(); i++) {
if (visit[arr[keys[i].r][keys[i].c].idx]) continue;
pq.push({ keys[i].r, keys[i].c
, key_dist[arr[cur.r][cur.c].idx][arr[keys[i].r][keys[i].c].idx] });
}
}
return -1;
}
int solve() {
setDist(); // key 간 dist setting=
return mst();
}
int main() {
ios::sync_with_stdio(false);
cin.tie(NULL);
cout.tie(NULL);
cin >> n >> k;
string row;
for (int i = 1; i <= n; i++) {
cin >> row;
for (int j = 1; j <= n; j++) {
arr[i][j] = { row[j - 1], -1 };
if (arr[i][j].val == 'S') {
start = pos{ i, j, 0 };
arr[i][j].val = '0';
}
else if (arr[i][j].val == 'K') {
keys.push_back(pos{ i, j, 0 });
arr[i][j].idx = keys.size() - 1;
}
}
}
keys.push_back({ start.r, start.c, 0 });
arr[start.r][start.c].idx = keys.size() - 1;
cout << solve() << '\n';
}'Algorithm (C++ based) > BOJ' 카테고리의 다른 글
| 백준 No.2008 [사다리 게임] (0) | 2022.12.04 |
|---|---|
| 백준 No.1167 [트리의 지름] (0) | 2022.11.28 |
| 백준 No.1967 [트리의 지름] (0) | 2022.11.28 |
| 백준 No.1725 [히스토그램] (2) | 2022.11.13 |
| 백준 No.1167 [트리의 지름] (3) | 2022.07.13 |




댓글